2001-2017
Vous touverez sur la page suivante en détails mes réalisations de 2001 à 2017
http://astronomie-astrophotographie.fr/conceptions.htm

Bienvenue sur ma Page Maker / Do It Yourself !!
Faire soi-même c’est se réapproprier les savoirs-faire mais aussi la technologie.
2001-2017
Vous touverez sur la page suivante en détails mes réalisations de 2001 à 2017
http://astronomie-astrophotographie.fr/conceptions.htm
05/2019
Un démonstrateur de mécanisme de montre suisse
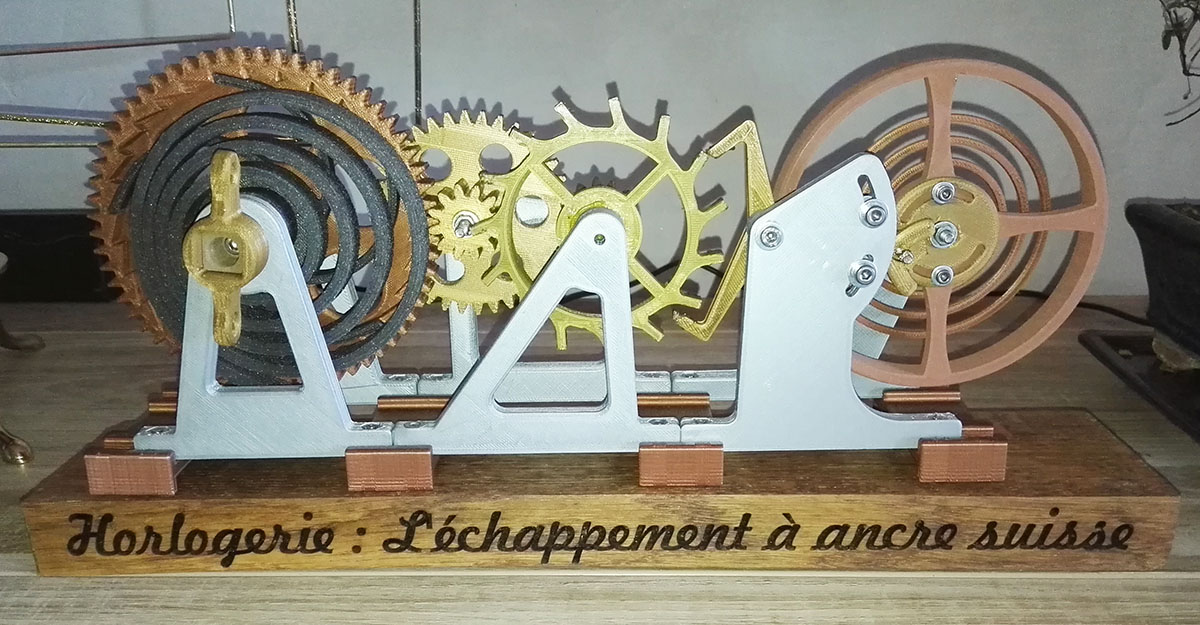
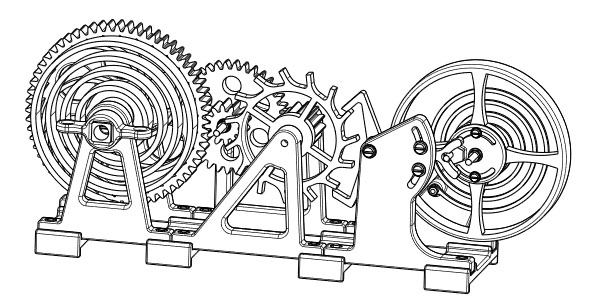
Basé sur une prototype trouvé sur Thingiverse , j'ai réalisé celui ci avec des filaments 3D chargés en métal.
https://www.thingiverse.com/thing:3364860/files
J'ai dû modifier certaines parties dont le ressort de barillet qui avait tendance à casser trop facilement lorsque le mécanisme était remonté au maximum.
Le réglage de la roue d'echappement et de l'ancre a été la partie la plus longue a effectuer.
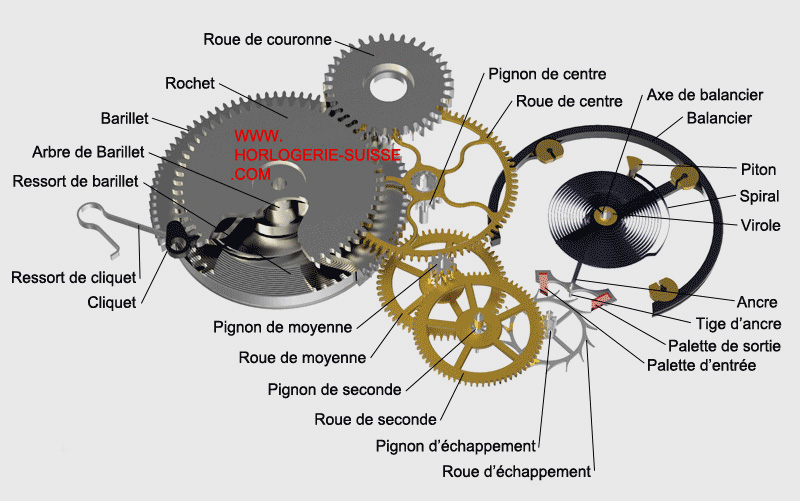
La force motrice arrive à l'échappement qui va la distribuer petit à petit au balancier.
Grâce à cette force, le balancier va osciller .
L'utilisation de filament en matière plastique augmente beaucoup le frottement des palettes d'entrée et de sortie sur la roue d'echappement .
Les différentes pièces ont été réalisées en filament métal ( Cuivre,laiton,bronze et aluminium de la marque SaintSmart).
Le balancier a été réalisé en filament cuivre de Colorfabb , celui ci ayant une forte densité , la vitesse du mouvement se fait plus lente et en jouant sur la valeur d'Infill ( remplissage interne de la pièce imprimée) j'ai réussis à approcher la durée du mouvement à 1sec.
Le ressort de barillet a été réalisé en filament ABS Alumine Optimus.
Voici une première vidéo de son fonctionnement aprés réglages :
Il ne me reste plus qu'a effectuer un support en chêne que vous pourrez bientôt découvrir....
2018
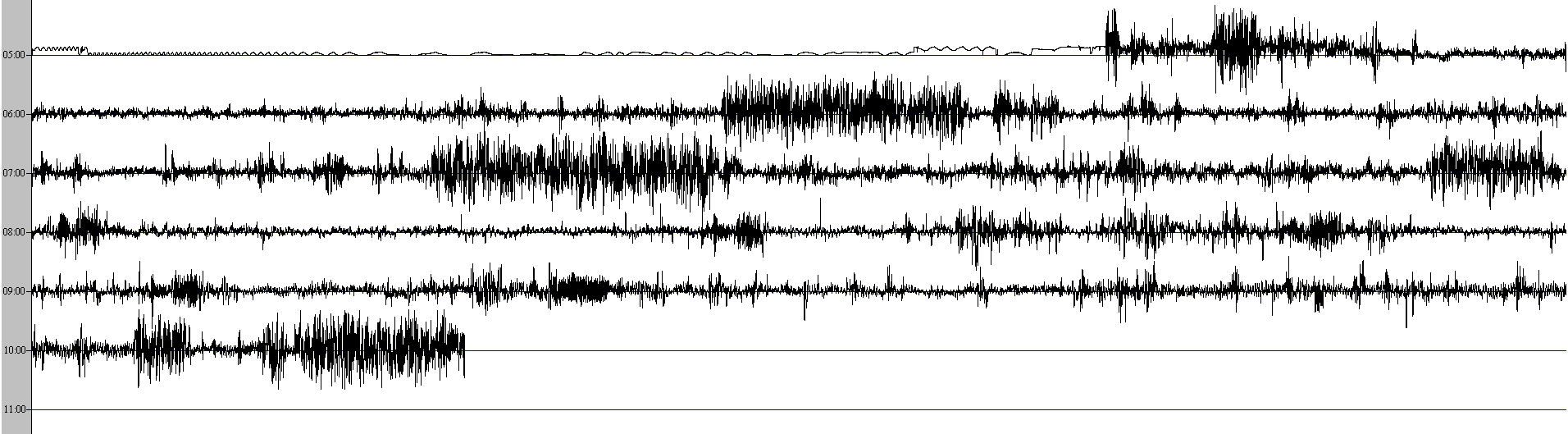
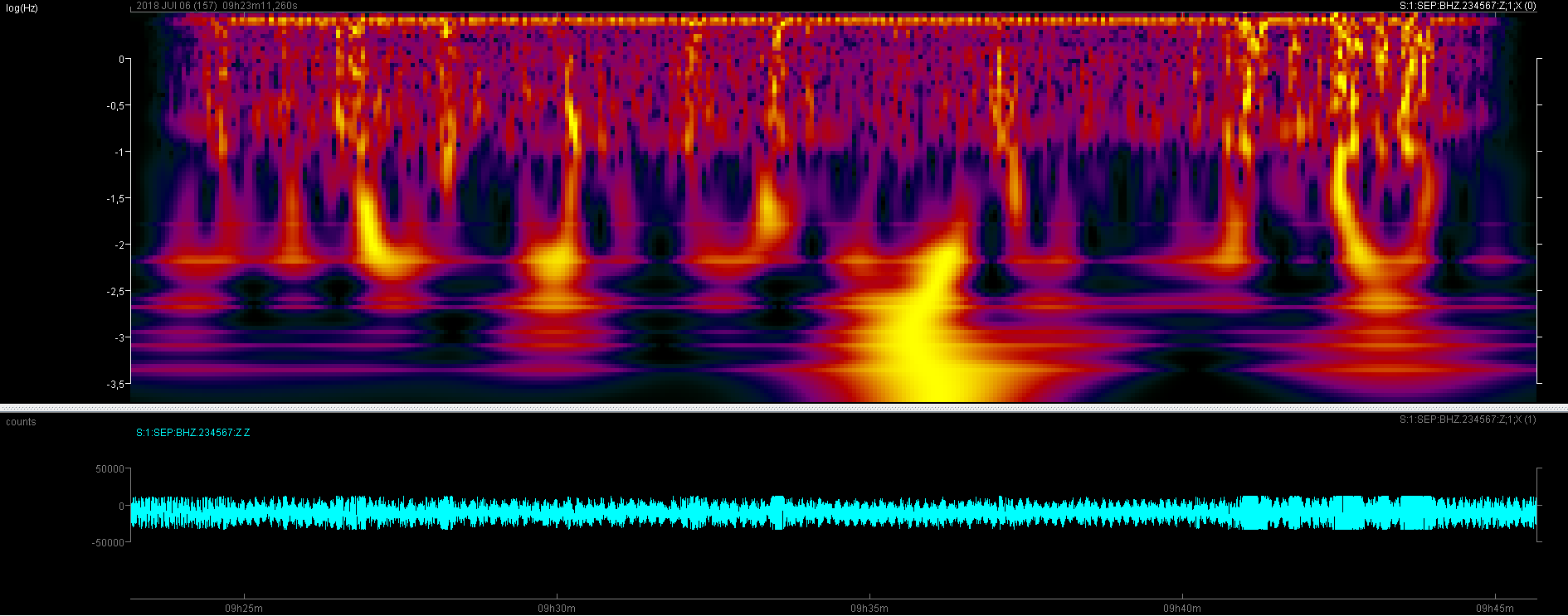
Sismomètre 3 axes
Mis au point pour le moment avec des cartes arduino nano et 2 geophones horizontaux et 1 géophone vertical..
Réalisation d'un amplificateur CMS avec le logiciel Eagle
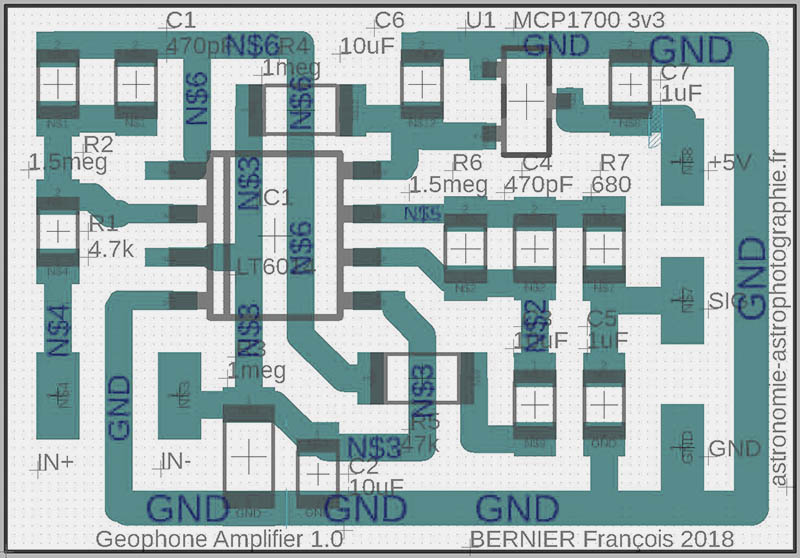
Le projet final utilisera des cartes STM Nucleo 32
Premier tests d'enregistrements :
2019
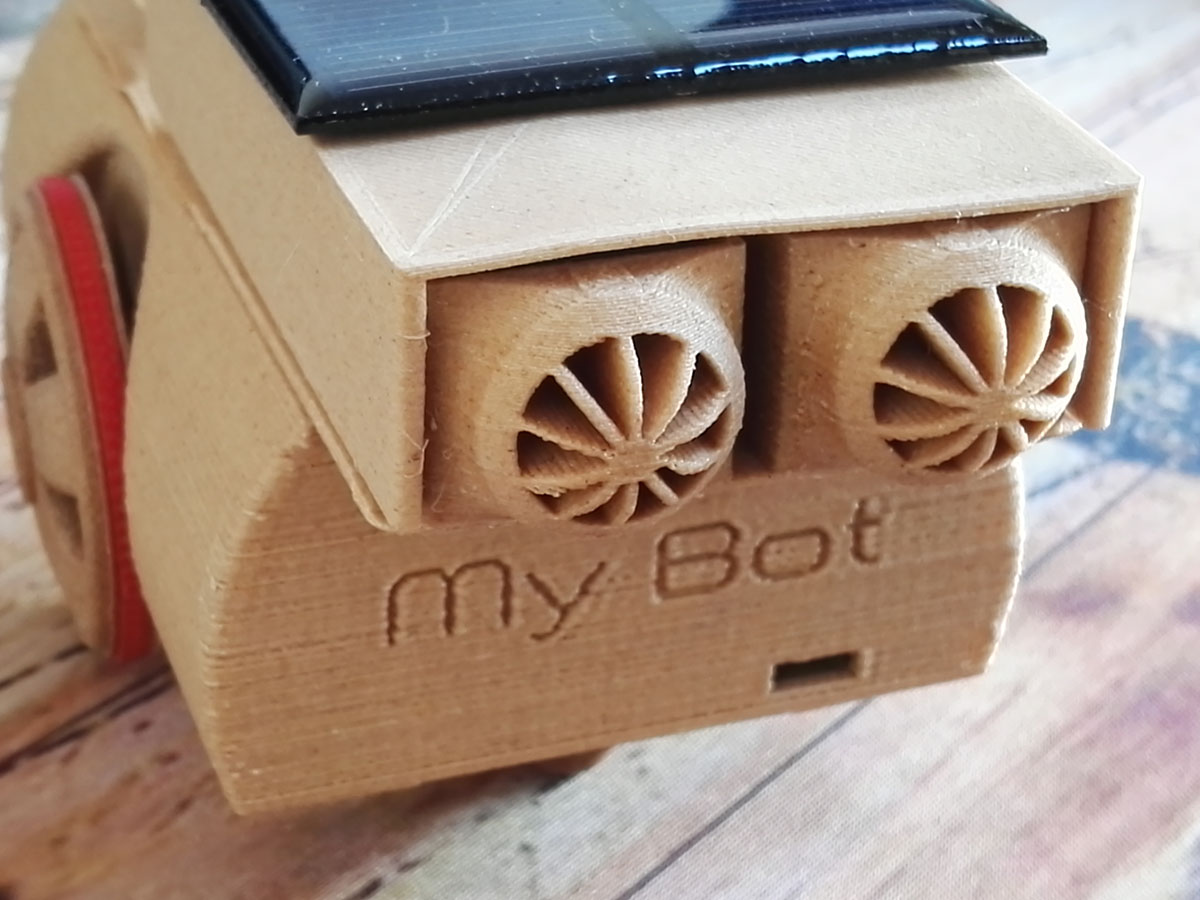
Un robot pour apprendre le codage
En cours de réalisation
Entierement réalisé en impression 3D , filament bois.
Modelisation sous Solidworks.
Controlleur principal ESP32 NODE MCU.
2 servos à rotation continu SG90 + 1 servo 180° SG90 pour la rotation de la tête
2 detecteurs de lignes
Mesure de la distance avec un capteur ultrasons HC-SR04
Contrôle du robots via application Android Bluetooth :
- pilotage directionnel
- affichage de la distance de l'obstacle
- pilotage des leds d'éclairage frontal
- pilotage de la rotation de la tête
...


2018
Pupitre de commande pour lancement de modèles de fusées
En cours de réalisation
2018
Ordinateur de vol pour modèles de fusées
Celui ci embarque 2 systèmes altimétriques
Le premier à partir d'une carte Teensy 3.2 et d'un prop shield ,d'un GPS et d'un module XBEE , renvoie en temps réel l'altitude,la position GPS les informations de la position dans l'espace de la fusée et le moment ou le parachute est ejecté.
Le deuxième à partir d'un Arduino Nano qui pilote la mise à feu de la charge d’éjection du parachute.
J'ai mis au point un petit logiciel qui récupère ces données , affiche en temps réel la représentation 3D dans l'espace de la fusée , et affiche dans le même temps toutes les informations dans la fenêtre.
Dans le même temps le logiciel génère un fichier data pour permettre de traiter toutes les informations et de générer les différentes courbes du vol.
Normalement la portée du XBEE PRO S2C va jusqu'à 3200m.
L'ensemble est monté sur un étage modélisé et imprimé en 3D dont vous pouvez voir les détails dans les 2 vidéos suivantes.
2018
Un logger altimètrique pour modèle réduit de fusée
Pour le passage de ma certification High Power Tripoli , j'ai mis au point ce petit altimètre qui sera logé dans la partie basse du cône , qui enregistrera tous les paramètres de vol sur une carte SD et me permettra de visualiser sur un écran l’apogée atteinte dès l'atterrissage.
Voici une petite démo de l'alti en vidéo.
En gros son mode de fonctionnement :
- allumage
- connexion wifi à mon téléphone et mise à jour de la date et l'heure via un serveur NTP
- initialisation du fichier d'enregistrement
- l'enregistrement des paramètres de vol est validé avec le switch noir à l'avant du module (environ 80 datas par sec)
- l’altimètre enregistre les datas sur la SD et affiche l'altitude max atteinte sur l'afficheur
2019
Levitateur acoustique
03/2019
1er test de figure de Lichtenberg
Avec un transformateur pour Neon de 10000 Volts / 100 mA sur un planche de Pin.

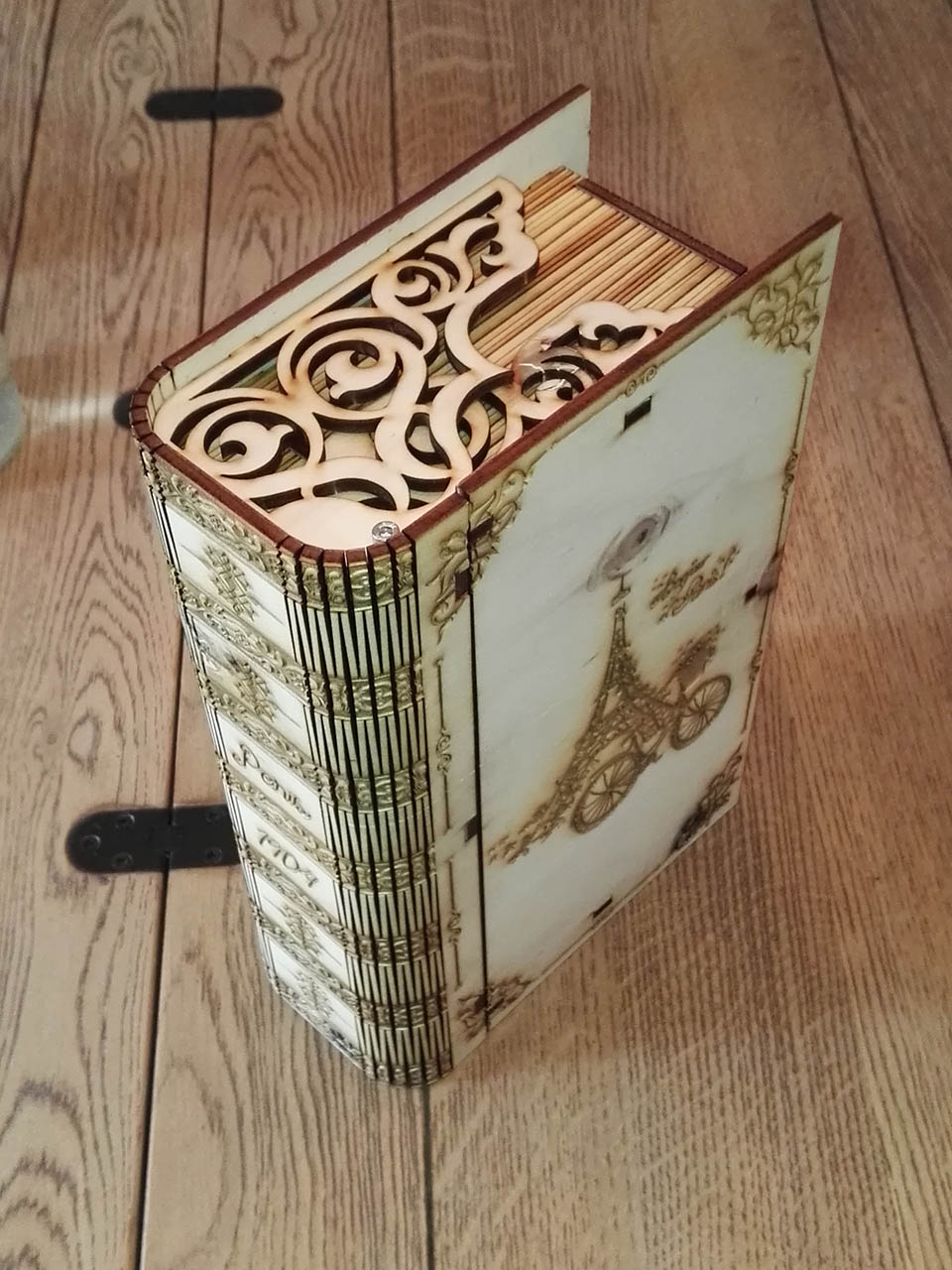
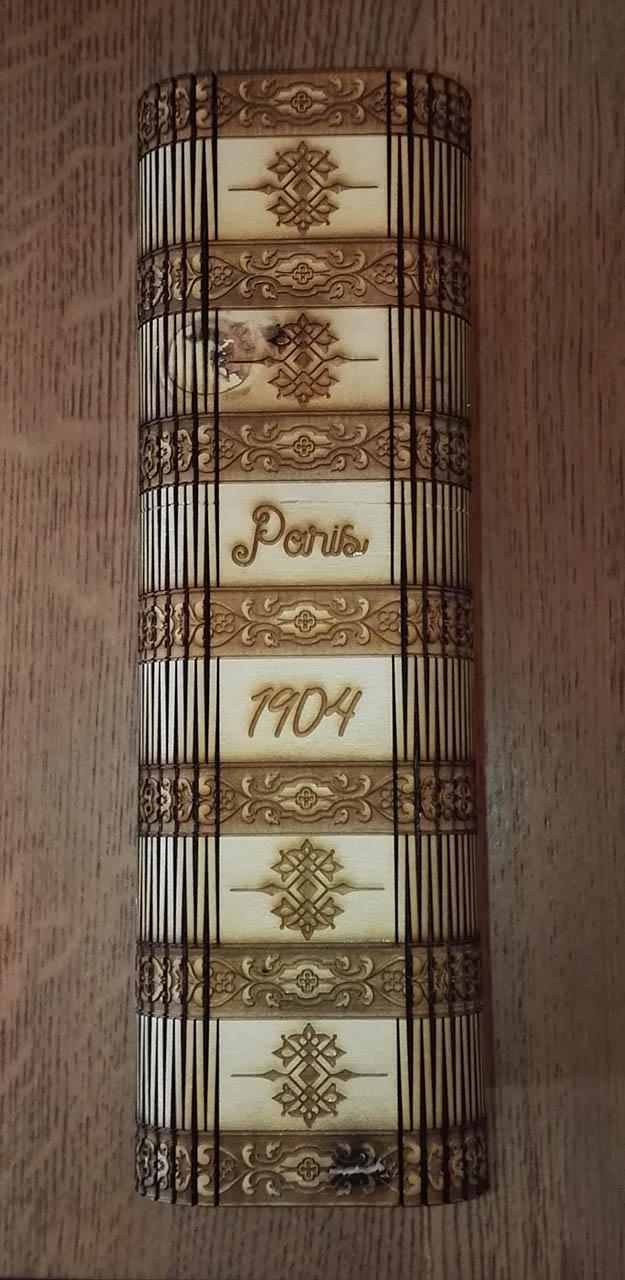
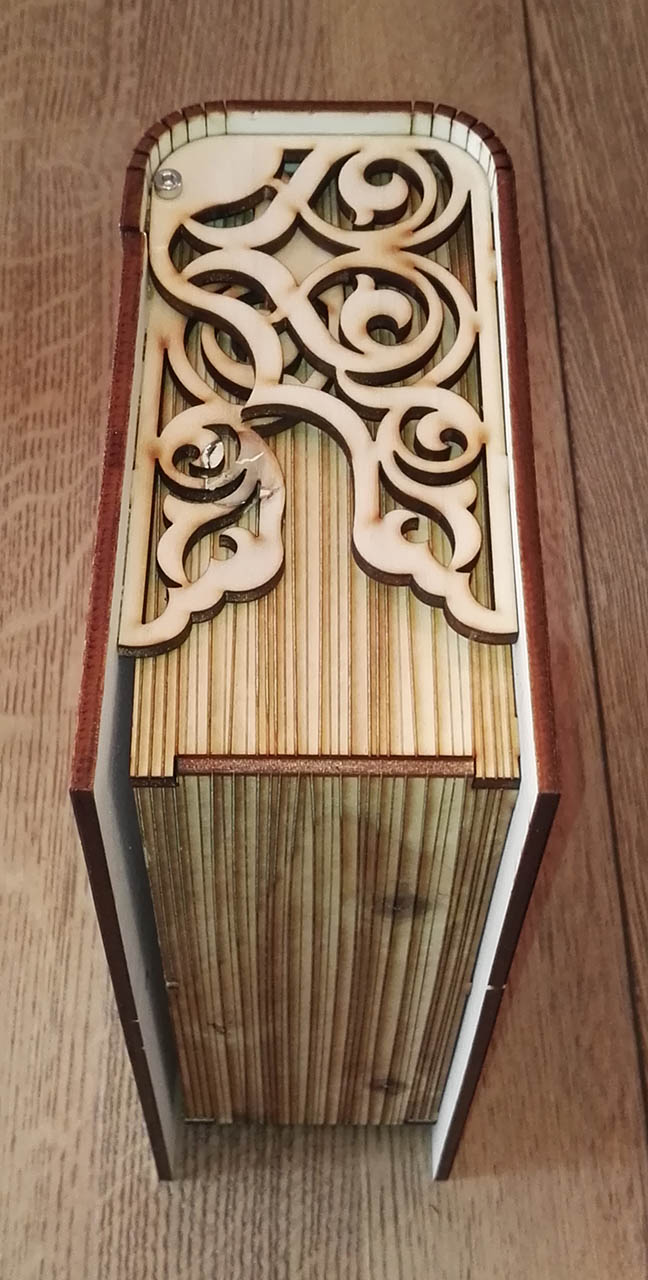
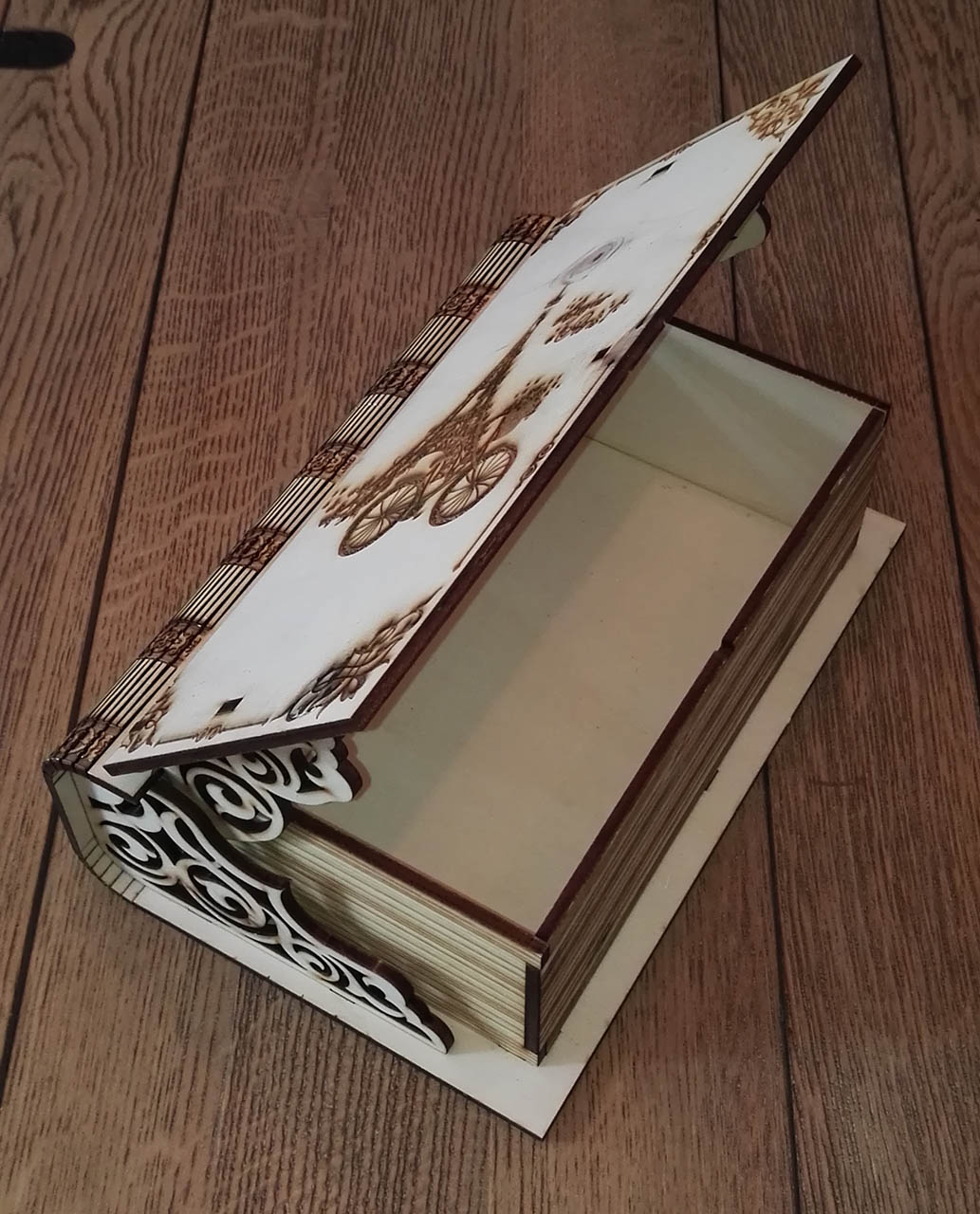
04/2019
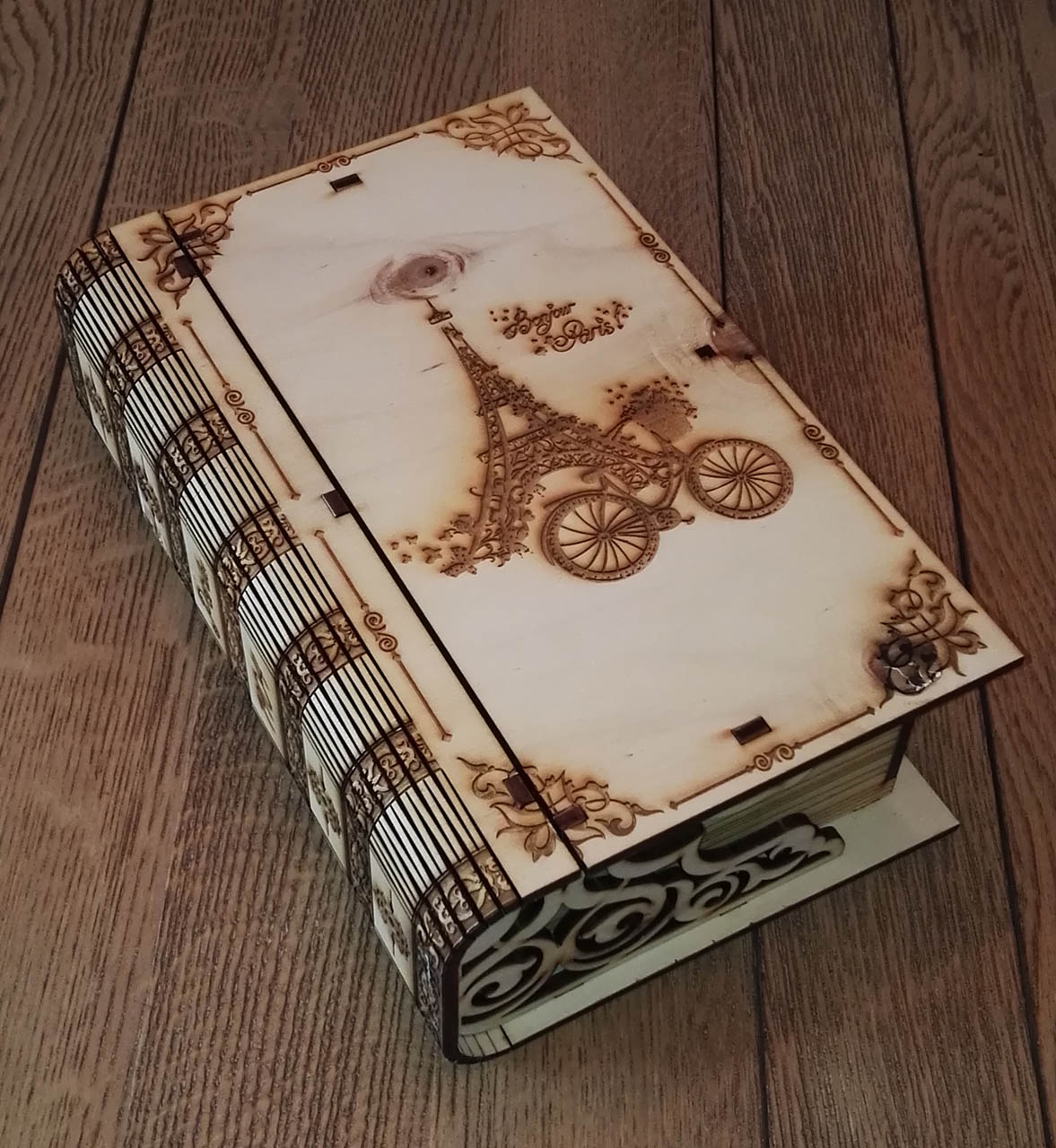
Boite / Livre en contreplaqué
Dessin réalisé sous Inkscape .
Boitier réalisé en contreplaqué peuplier de 3mm d'epaisseur.



05/2019
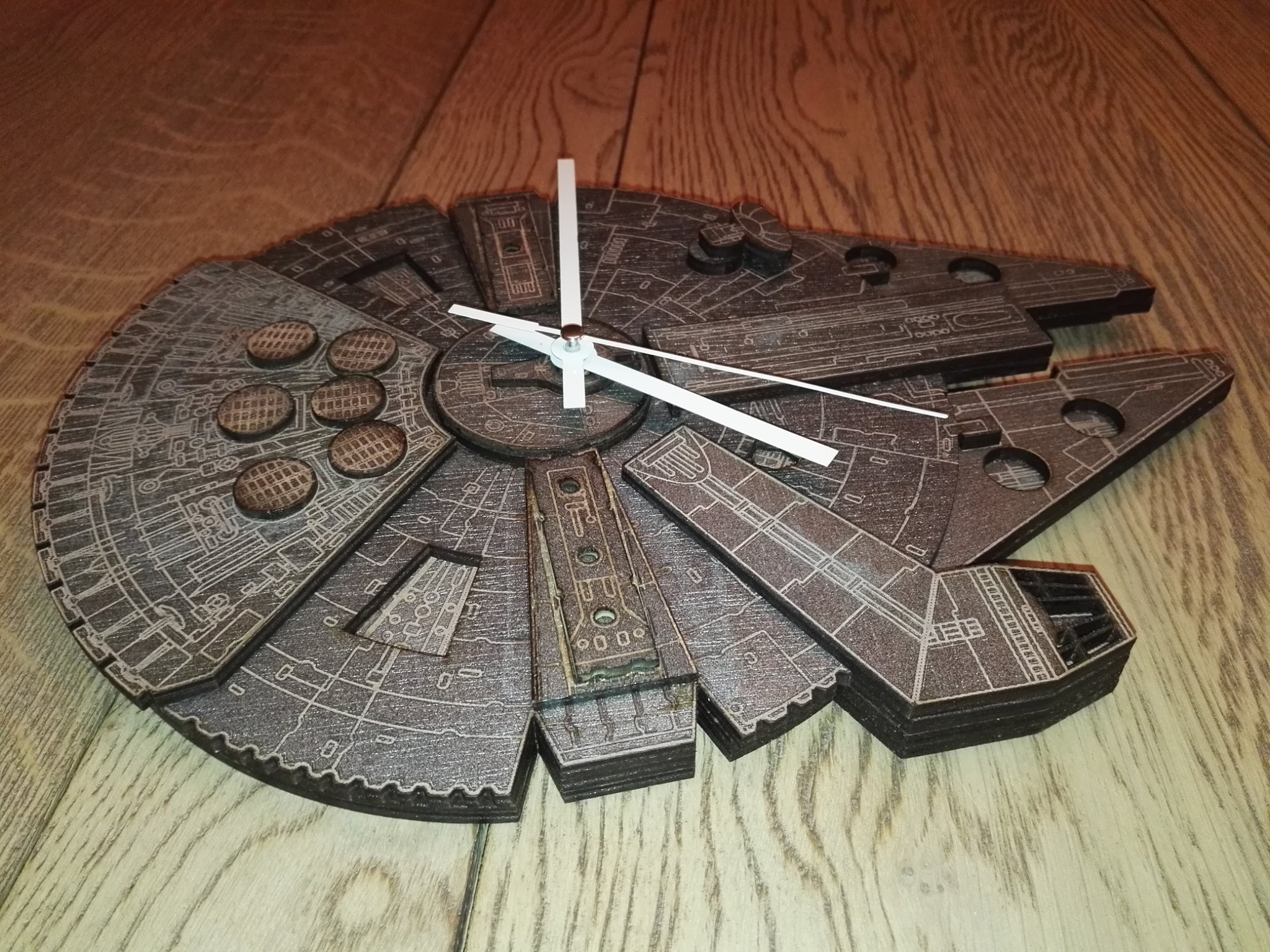
Horloge StarWars Faucon Millenium en contreplaqué
Réalisé sous Inkscape en contreplaqué de 3 et 5 mm en 5 couches différentes pour donner du relief à l'horloge.
Mécanisme acheté sur Aliexpress



SteamPunk Horse

2018 - 2019
Divers pièces réalisées avec une fraiseuse numérique MDX-40A
Réalisation sur bois de chêne

Réalisation sur du bois d'olivier

Réalisation sur bois de Murier

Réalisation sur bois de chêne

Réalisation sur bois de chêne

Logo Harley-Davidson - Réalisation sur bois de Chêne
![]()
02/2019
Une Horloge Nixie
Réalisée à partir d'un kit electronique acheté en Ukraine.
Boitier réalisé sous le logiciel Inkscape en découpe Laser.
Contreplaqué avec placage chêne réalisé sous presse à chaud + plaque diffuseuse pour les leds en Plexiglass déssinée sous Solidworks.




03/2019
Un cadre Makers fails...
Réalisé à partir de ratés d'impression 3D stockés pendant 3 ans dans un tiroir de la chambre que j'ai enfin libéré.


2016-2019
Divers pièces réalisées en impression 3D
The Pringle Rocket



La fusée de Tintin

Quelques pots pour plantes grasses réalisés en filament bois , Colorfabb , Formfutura, Laywood D3




Un Yoyo en filament chargé de métal , aluminium et cuivre

X-Wing
Peinture acrylique

Quelques statuettes , filament bois et metal chargé en acier


Vase en filament bois

Nez de marche en filament bois